
#96 F1/10 Autonomous Racing Course and Competition
- Principal Investigator
- Rahul Mangharam
- Status
- Overdue Project
- Start Date
- July 1, 2017
- End Date
- June 30, 2023
- Project Type
- Education - Workforce Development
- Grant Program
- FAST Act - Mobility National (2016 - 2022)
- Grant Cycle
- Mobility21 - University of Pennsylvania
- Visibility
- Public
- Photo:
- Download
{kind=link}
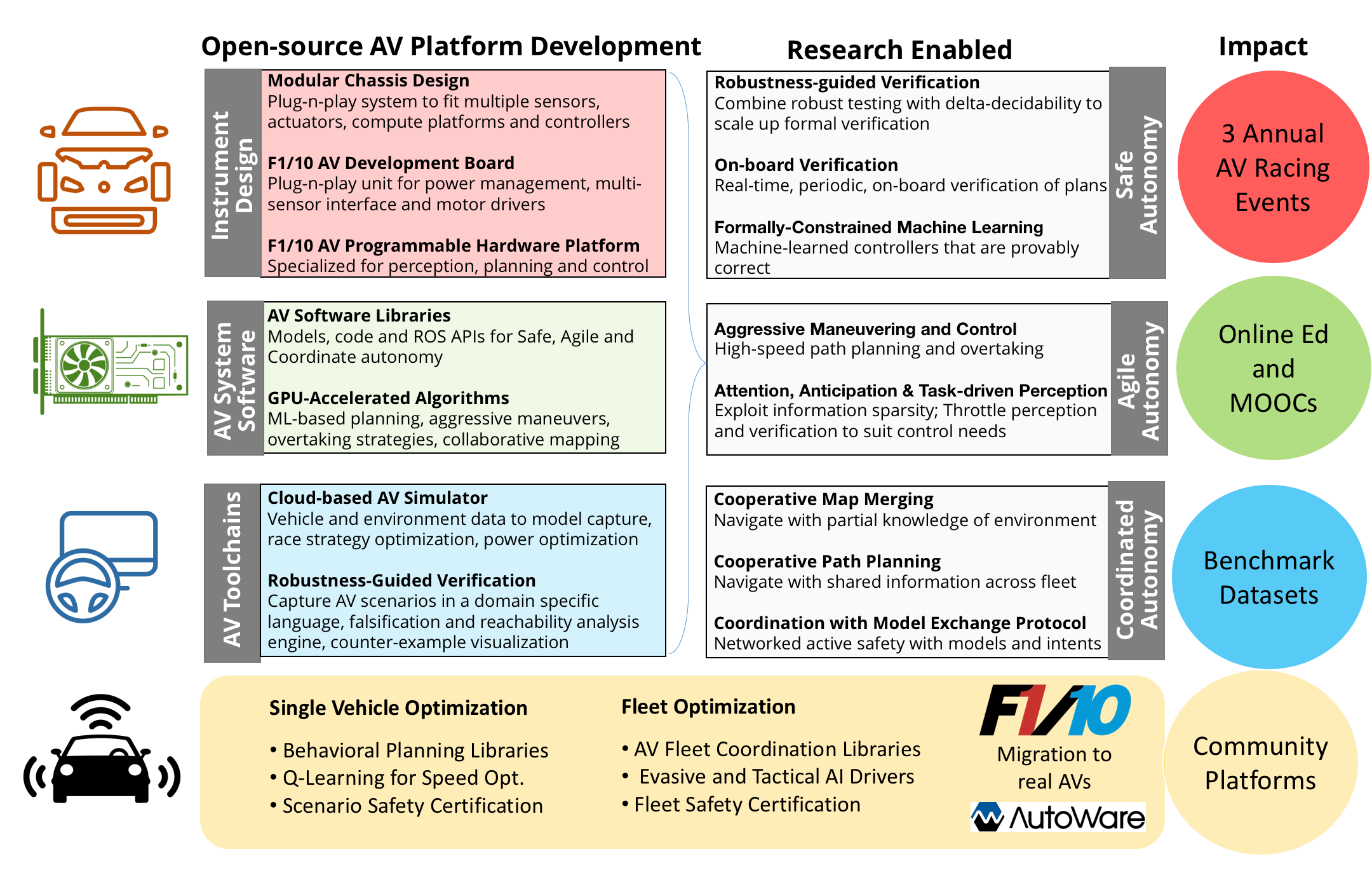
Abstract
Contribution: An autonomous vehicle hardware platform, called F1TENTH, is developed for teaching autonomous systems hands-on. This article describes the teaching modules and software stack for teaching at various educational levels with the theme of ``racing" and competitions that replace exams. Background: College-level robotics courses often focus on theory, while most hardware platforms for robotics teaching are low-level toys aimed at younger students at middle-school levels. The F1TENTH robotic race car fills the gap between research platforms and low-end toy cars and offers the hands-on experience in learning the topics in autonomous systems. Intended Outcomes: The F1TENTH vehicles offer a modular hardware platform and its related software for teaching the fundamentals of autonomous driving algorithms. From basic reactive methods to advanced planning algorithms, the teaching modules enhance students' computational thinking through autonomous driving with the F1TENTH vehicle. Application Design: Over 12 universities have adopted the teaching modules for their semester-long undergraduate and graduate courses for multiple years. Student feedback is used to analyze the effectiveness of the F1TENTH platform. Findings: More than 80\% of the students strongly agree that the hardware platform and modules greatly motivate their learning, and more than 70% of the students strongly agree that the hardware enhanced their understanding of the subjects. The survey results show that more than 80% of the students strongly agree that the competitions motivate them for the course.
Description
A new course for teaching hands-on autonomous systems with modular autonomous vehicle hardware and software has been created. The hypothesis is that autonomous driving fundamentals must be taught in combination with actual hardware to prepare the students for industry and academia jobs. This combination will enhance the students' computational thinking regarding the software and their systems thinking regarding the whole autonomous vehicle. This is because the students are allowed for repeated testing and iteration and have the affordance of a physical device to learn as opposed to on-screen simulation only. Furthermore, it is hypothesized that by teaching autonomous driving in a competitive environment called Autonomous Racing, the motivation and fascination for learning in the field of autonomous vehicles and programming can be kept higher. The idea behind this variation of competition-based learning is to have three races in the course that incentivizes the students while not using rankings for grading, with the goal to teach more than in comparison to a standard class. Here is the course contents - https://tinyurl.com/F1TENTH-22Schedule Module A: Introduction to F1TENTH, the Simulator & ROS2 1 Introduction to Autonomous Driving 2 Automatic Emergency Braking 3 Rigid Body Transform Module B: Reactive Methods 4 Vehicle States, Vehicle Dynamics and Maps 5 Follow the Wall: First Autonomous Drive 6 Follow the Gap: Obstacle Avoidance 7 Race 1: Preparation 8 Race 1: Single-Vehicle: Obstacle Avoidance Module C: Mapping & Localization 9 Scan matching 10 Particle Filter 11 Introduction to Graph-based SLAM Module D: Planning & Control 12 Local Planning: RRT, Spline Based Planner 13 Path Tracking: Pure Pursuit 14 Path Tracking: Model Predictive Control 15 Behavioral Planning: Trustworthy Autonomous Vehicles Module E: Vision 16 Classical Perception: Lane Detection 17 Machine Learning Perception: Object Detection 18 Final Project Selection 19 Race 2: Preparation 20 Race 2: Single-Vehicle: High-Speed Module F: Special Topics and Invited Talks 21 Ethics for Autonomous Systems 22 Raceline Optimization 23 Special Topic 1 24 Special Topic 2 25 Special Topic 3 Module G: Race 3 And Project Demonstrations 26 Race 3: Preparation 27 Race 3: Multi-Vehicle Head-to-Head 28 Project Demonstrations
Timeline
The course will be taught again in January-May 2023. More details on the overall project is at https://f1tenth.org We have hosted 10 international autonomous racing competitions - https://f1tenth.org/race The 10th competition was attended by over 100 participants from 23 different teams. All teams built the same reference platform and competed based on their autonomous racing algorithms. The next race will by at 2023 IEEE International Conference on Robotics and Automation (ICRA), May 2023 in London, UK.
Strategic Description / RD&T
Deployment Plan
We developing https://courses.f1tenth.org/ for online offerings of this curriculum.
Expected Outcomes/Impacts
The course instructors will develop 40 reference platform vehicles and demonstrate them working at high speeds of 8-15mph in corridors. We will host 11 international competitions with over 65 academic partners worldwide.
Expected Outputs
TRID
Individuals Involved
| Name | Affiliation | Role | Position | |
|---|---|---|---|---|
| shubh566@seas.upenn.edu | Agarwal, Shubh | University of Pennsylvania | Other | Student - Masters |
| aminea@seas.upenn.edu | Amine, Ahmad | University of Pennsylvania | Other | Student - Masters |
| joebetz@seas.upenn.edu | Betz, Johannes | University of Pennsylvania | Other | Faculty - Research/Systems |
| rahulm@seas.upenn.edu | Mangharam, Rahul | University of Pennsylvania | PI | Other |
| zzang@seas.upenn.edu | Zang, Zirui | University of Pennsylvania | Other | Student - PhD |
| hongruiz@seas.upenn.edu | Zheng, Hongrui | University of Pennsylvania | Other | Student - PhD |
| zhijunz@seas.upenn.edu | Zhuang, Zhijun | University of Pennsylvania | Other | Student - Masters |
Budget
Amount of UTC Funds Awarded
$363197.00Total Project Budget (from all funding sources)
$363197.00Documents
Match Sources
No match sources!
Partners
No partners!