Abstract
Parking is critical to transportation system, however, the impact of parking management to traffic congestion has long been overlooked, partially due to the lack of high granular parking data. Real-time monitoring parking occupancy at the block level for the entire city is oftentimes infeasible because parking sensors are costly. This research will use computer vision techniques to provide ubiquitous and cheap sensing for detecting parking occupancy in high granularity. This would enable efficient management of parking infrastructure, which leads to mitigate traffic congestion, enhance transportation infrastructure resilience, and reduce environmental impacts. We will use W. Liberty Ave in Dormont as our test site, parking on this street is prohibited during rush hour and compliance of motorists have a significant impact on congestion. Parking occupancy will be measured by analyzing videos from vehicles that traveled on this road. Developing this detector will be one of the main tasks of this project. Combining this data with traffic flow data and other information will let us analyze impact on traffic of parking restrictions and determine the optimal trade-off between parking availability and traffic flow. This will be integrated into a general parking and roadway information system and provide Dormant with an efficient strategy to manage parking along the W. Liberty Ave corridor.
Description
Introduction
Everyone who drives needs to park. Parking or the lack of is an important issue facing both motorists and public agencies. Statistics show that a typical vehicle parks 23 hours a day, and the cruise time spent on searching for a parking spot takes up to 40% of the total travel time. Parking cost takes up to 70% of the direct travel cost. The parking charges, availability and accessibility can considerably influence when, where and how people travel. Though being critical to the transportation system, the impact of parking management to traffic congestion is overlooked for decades, partially due to the lack of high granular parking data. Real-time monitoring parking occupancy at the block level for the entire city is oftentimes infeasible because parking sensors are costly. This research will use computer vision techniques to provide ubiquitous and cheap sensing for detecting parking occupancy in high granularity. This would enable efficient management of parking infrastructure, which leads to mitigate traffic congestion, enhance transportation infrastructure resilience, and reduce environmental impacts.
One specific example is in Dormont, PA. All of the 4 lanes of its artery road are used for driving traffic only during rush hours, but the right lanes can be used for parking during off-hours. The crucial part is to find the right timing to switch between those two modes. If parking is prohibited too late, it can cause significant traffic congestion. On the other hand, if it is prohibited too early, not enough parking is available and businesses will lose revenue. To monitor parking occupancy, and come up with the optimal time for the switch-over, one needs to collect traffic flow data as well as parking data in an efficient and inexpensive manner. The two co-PIs will join in this project to aggregate this data and analyze it to determine the optimal switch-over time.
Parking detection
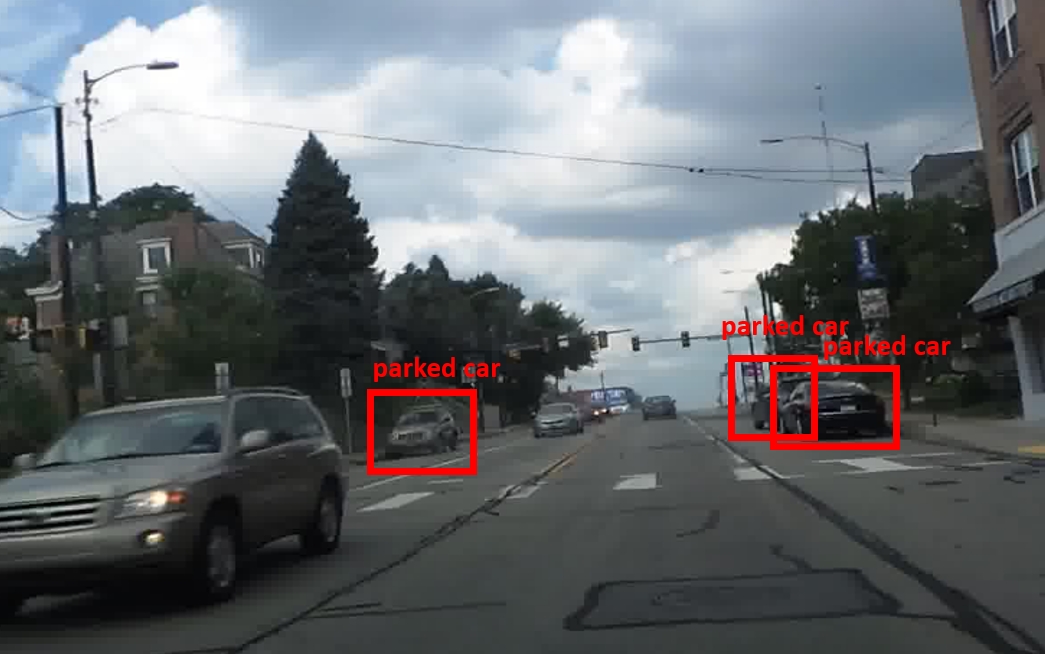
A significant part of the research will involve the detection of vehicles parked on the side of the road. Figure 1 shows a typical image of cars parked on the side of the road about 40 minutes after the switch-over time.
Parking spot detection has been done in the past, this reference [1] gives an overview. Most approaches use fixed cameras. In a few cases mobile sensors are used, but those are sonar, radar, and Lidar. We want to use smartphones as mobile sensors.
Detecting the car itself can be done with a standard deep learning vehicle detector. The challenging part will be to determine if the car is parked or not. We will test several approaches. One approach will be to detect other objects in the vicinity of the vehicle and its distance to it. Such objects could be curb, parking meter, or building. A second approach will be to give a neural network examples of parked cars directly and train it with those. Another approach will be to track the vehicles and see if they are moving.
The test site
As the test area we will use W. Liberty Ave in Dormont, between Brookline Blvd. and Scott Rd. (see Figure 2). We already have collected data over the past 5 years on that stretch of road and will continue collecting. One of the PIs drives on this road regularly. Besides these regular collections, we will collect data on two days in 5 to 10 minute intervals around the switch-over time.
Traffic data
The PIs have obtained the following data sets for this research through the Mobility Data Analytics Center, all for the Allegheny County:
• GIS data and planning models
• Real-time traffic speed data of probe vehicles covering major highway and arterials
• Traffic counts covering some highway segments and some arterials
Analysis
Here are the basic questions we like to answer:
1. Can we use smartphone cameras to extract parking occupancy information at the high granularity, namely at the block level, counting individual vehicles, for every five to ten minutes for a few days and on a regular basis over a year.
2. In the Dormant case, at what times do parking restrictions have significant impacts on traffic flow? What is the compliance of people to the current parking restrictions? What is the optimal trade-off between parking availability and traffic flow?
Expected outcomes
The anticipated outcomes are 1) efficient algorithms to process and extract parking occupancy information at the block level for each 5-10 minutes; 2) an integrated parking and roadway information system (PARIS) that collects, archives, and fuses massive parking and traffic data, along with a prototype online map-based information system that is capable of providing user-friendly interfaces to disseminate parking information in different levels of temporal and spatial granularity; 3) a comprehensive solution for Dormont, PA to detect parking along the Route-19 corridor, enable efficient enforcement strategies, and determine the optimal parking-to-traffic-flow switch time.
[1] Enríquez F., Soria L.M., Álvarez-García J.A., Velasco F., Déniz O. (2017) Existing Approaches to Smart Parking: An Overview. In: Alba E., Chicano F., Luque G. (eds) Smart Cities. Smart-CT 2017. Lecture Notes in Computer Science, vol 10268. Springer, Cham
Timeline
July 1, 2018: Start of project
by September 2018: Development of initial parking detector
by December 2018: First pass of combined analysis of traffic flow and parking data
by March 2019: Development of final parking detector
Spring 2019: Preliminary results, feedback from Dormont
by June 2019: Final system and final report
June 30, 2019: End of project
Strategic Description / RD&T
Deployment Plan
The startup company RoadBotics [2] will be involved in the data collection from the beginning. It will provide an Android app for road data collection, store the data in a cloud platform and make it accessible to the team via a web interface at no cost to CMU. We will talk to the Borough to inquire about their current parking management methods. Preliminary and final results will be shared with Dormont to receive feedback and gauge interest in the system. RoadBotics is also a potential commercialization partner after the completion of the project.
[2] www.roadbotics.com, disclosure: The PI Christoph Mertz is co-founder and part-time consultant (Chief Scientist) of the company.
Expected Outcomes/Impacts
Parking occupancy detection metrics: Compare detected parked cars with ground truth, calculate precision an recall.
Integrated parking and roadway information system metrics: Qualitative evaluation through feedback from Dormont
Comprehensive parking solution for Dormont metrics: Qualitative evaluation through feedback from Dormont
Expected Outputs
TRID
Individuals Involved
| Email |
Name |
Affiliation |
Role |
Position |
| cmertz@andrew.cmu.edu |
Mertz, Christoph |
Carnegie Mellon University |
PI |
Other |
| seanqian@cmu.edu |
Qian, Sean |
Carnegie Mellon University |
Co-PI |
Faculty - Untenured, Tenure Track |
Budget
Amount of UTC Funds Awarded
$90000.00
Total Project Budget (from all funding sources)
$99912.00
Documents
| Type |
Name |
Uploaded |
| Data Management Plan |
DMP_parking_detection_v3.pdf |
June 9, 2018, 4:42 a.m. |
| Progress Report |
172_Progress_Report_2018-09-30 |
Sept. 24, 2018, 7:34 a.m. |
| Presentation |
trb_abstract.pdf |
March 25, 2019, 5:44 a.m. |
| Presentation |
up-to-date_city_map_poster.pdf |
March 26, 2019, 5:18 a.m. |
| Progress Report |
172_Progress_Report_2019-03-30 |
March 29, 2019, 7:01 a.m. |
| Publication |
Pi_partC_2019.pdf |
Sept. 30, 2019, 6:26 a.m. |
| Progress Report |
172_Progress_Report_2019-09-30 |
Sept. 30, 2019, 8:26 a.m. |
| Final Report |
172_-_Final_Report.pdf |
Jan. 21, 2020, 6:31 a.m. |
| Progress Report |
172_Progress_Report_2020-03-30 |
March 17, 2020, 9:27 a.m. |
| Publication |
Camera-based semantic enhanced vehicle segmentation for planar lidar. |
Nov. 27, 2020, 6:29 p.m. |
| Publication |
Modeling heterogeneous traffic flow: A pragmatic approach. |
Dec. 2, 2020, 9:04 a.m. |
| Publication |
User-centric interdependent urban systems: Using time-of-day electricity usage data to predict morning roadway congestion. |
Dec. 2, 2020, 9:10 a.m. |
| Publication |
Understanding and predicting roadway travel time with spatio-temporal features of network traffic flow, weather conditions and incidents |
Dec. 2, 2020, 9:10 a.m. |
| Publication |
A non-sensor solution for effective and inexpensive parking management: payment, reservation, and dynamic pricing. |
Dec. 2, 2020, 9:13 a.m. |
| Publication |
A Subgradient Approach to Solve for Path-Based System Optimal Dynamic Traffic Assignment |
Dec. 2, 2020, 9:14 a.m. |
Match Sources
No match sources!
Partners
| Name |
Type |
| RoadBotics |
Deployment Partner Deployment Partner |
| Dormont |
Deployment Partner Deployment Partner |

{kind=link}