
#97 Autonomous Air Traffic Controller
- Principal Investigator
- Rahul Mangharam
- Status
- Completed
- Start Date
- July 1, 2017
- End Date
- June 30, 2018
- Project Type
- Research Advanced
- Grant Program
- MAP-21 TSET National (2013 - 2018)
- Grant Cycle
- TSET - University of Pennsylvania
- Visibility
- Public
- Photo:
- Download
{kind=link}
Abstract
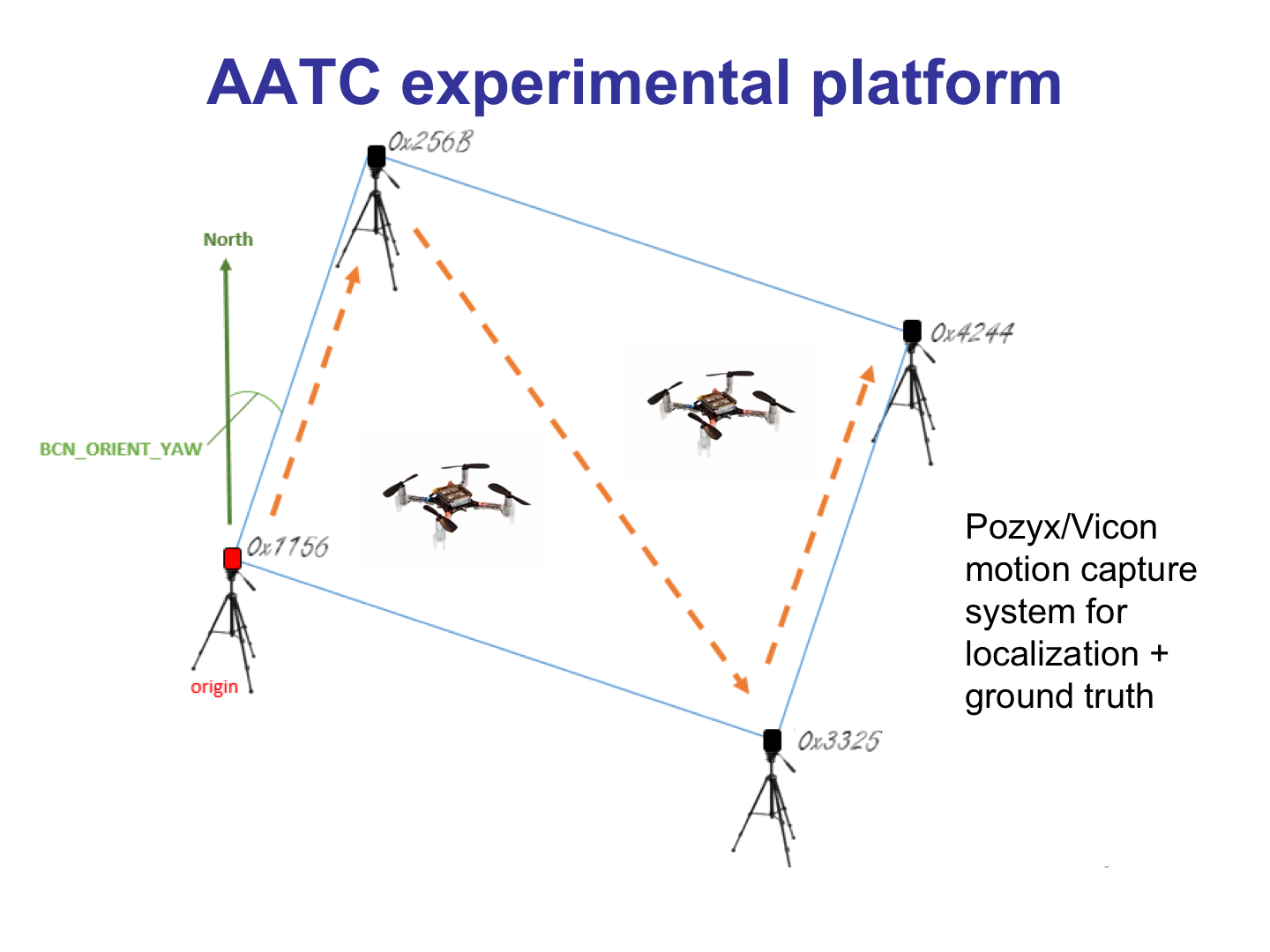
This project involves getting multiple quad-rotors to autonomously complete a set of given missions in an environment that has a motion capture system. We will be using the Crazyflie 2.0 quad-rotors and either a Vicon or Pozyx motion capture system. We will build the platform and underlying software (mostly using ROS) that will be used in the project. This will require getting familiar with the motion capture system, and reading those messages in ROS. This localization information will be used for closed loop (position) control of the quad-rotors. Since the platform will be used as a demonstrator for ongoing research at the mLab, multiple levels of controllers will be required, from waypoint following, to tracking a desired attitude (roll/pitch/yaw). For this, a hierarchical control architecture will implemented for the quad-rotor. For the mission level requirements, an interface will be developed to control and coordinate multiple quad-rotors to follow a given task. Underlying algorithms will be discussed (and implemented in ROS) as the project progresses.
Description
Modern control systems, like controllers for swarms of quadrotors, must satisfy complex control objectives while withstanding a wide range of disturbances, from bugs in their software to attacks on their sensors and changes in their environments. These requirements go beyond stability and tracking, and involve temporal and sequencing constraints on system response to various events. This work formalizes the requirements as formulas in Metric Temporal Logic (MTL), and designs a controller that maximizes the robustness of the MTL formula. Formally, if the system satisfies the formula with robustness r, then any disturbance of size less than r cannot cause it to violate the formula. Because robustness is not differentiable, this work provides arbitrarily precise, infinitely differentiable, approximations of it, thus enabling the use of powerful gradient descent optimizers. Experiments on a multi-quadrotor system demonstrate that this approach to controller design outperforms existing approaches to robustness maximization based on Mixed Integer Linear Programming and stochastic heuristics. Moreover, it is not constrained to linear systems.
Timeline
July 1, 2017 to June 30, 2018
Strategic Description / RD&T
Deployment Plan
1. Implement a closed loop position/velocity tracking controller for the quad-rotors in ROS, with re-usable components of the hierarchical controller which can also be swapped out for other algorithms. 2. Implement a waypoint generator and tracker for a single quad-rotor to fly at least two given geometrical profiles. 3. Get multiple quad-rotors to follow out at least two co-ordinated flight profiles.
Expected Outcomes/Impacts
Develop a high level mission planner to generate scenarios and carry them out.
Expected Outputs
TRID
Individuals Involved
| Name | Affiliation | Role | Position | |
|---|---|---|---|---|
| rahulm@seas.upenn.edu | Mangharam, Rahul | University of Pennsylvania | PI | Other |
| yashpant@seas.upenn.edu | Pant, Yash | University of Pennsylvania | Other | Student - PhD |
| mryerson@upenn.edu | Ryerson, Megan | University of Pennsylvania | Other | Faculty - Untenured, Tenure Track |
Budget
Amount of UTC Funds Awarded
$0.00Total Project Budget (from all funding sources)
$Documents
Match Sources
No match sources!
Partners
No partners!